Analytische Geometrie
Die analytische Geometrie (auch Vektorgeometrie oder Koordinatengeometrie) ist ein Teilgebiet der Geometrie, das algebraische Hilfsmittel (vor allem aus der linearen Algebra) zur Lösung geometrischer Probleme bereitstellt. Der Kerngedanke der analytischen Geometrie besteht darin, geometrische Gebilde wie Kurven (insbesondere Geraden) oder Flächen (insbesondere Ebenen) als Punktmengen aufzufassen und jedem Punkt Zahlen zuzuordnen, die den Punkt eindeutig beschreiben (sogenannte Koordinaten). Kurven und Flächen können dadurch oft mithilfe von Gleichungen oder Gleichungssystemen beschrieben werden. Dies ermöglicht es in vielen Fällen, geometrische Aufgabenstellungen rein rechnerisch zu lösen, ohne die Anschauung zu Hilfe zu nehmen. Die Ergebnisse dieser Berechnungen werden dann in geometrische Aussagen „rückübersetzt“.
Demgegenüber wird Geometrie, die ihre Sätze ohne Bezug zu einem Koordinatensystem auf einer axiomatischen Grundlage begründet, als synthetische Geometrie bezeichnet.
Die Verfahren der analytischen Geometrie werden in allen Naturwissenschaften angewendet, vor allem aber in der Physik, wie zum Beispiel bei der Beschreibung von Planetenbahnen. Ursprünglich befasste sich die analytische Geometrie nur mit Fragestellungen der ebenen und der räumlichen (euklidischen) Geometrie. Im allgemeinen Sinn jedoch beschreibt die analytische Geometrie affine Räume beliebiger Dimension über beliebigen Körpern.
Die analytische Geometrie bildet die Grundlage für die meisten modernen Gebiete der Geometrie wie die algebraische Geometrie, die Differentialgeometrie, die diskrete Geometrie und die algorithmische Geometrie.
Das Koordinatensystem

Entscheidendes Hilfsmittel der analytischen Geometrie ist ein Koordinatensystem, meist ein kartesisches Koordinatensystem. Für manche einfache Fragestellungen, etwa die Bestimmung von Geradenschnittpunkten, die Untersuchung von Geraden auf Parallelität oder die Berechnung von Teilverhältnissen, würde allerdings schon ein schiefwinkliges Koordinatensystem ausreichen. Unverzichtbar ist ein kartesisches Koordinatensystem, wenn Abstände oder Winkel berechnet werden sollen.
Vektoren
Viele Rechnungen der analytischen Geometrie werden durch die Verwendung von Vektoren vereinheitlicht und vereinfacht. Obwohl die gesamte analytische Geometrie ohne Vektoren erfunden wurde und natürlich weiterhin ohne Vektoren auskommt und umgekehrt der Vektorraum als ein abstrakt-algebraisches Konstrukt ohne geometrischen Bezug definiert werden kann, erscheint die Verwendung von Vektoren in kartesischen Koordinatensystemen so natürlich, dass „Lineare Algebra und Analytische Geometrie“ in der Sekundarstufe II und im mathematisch-physikalisch-technischen Grundstudium allgemein als ein Kurs unterrichtet werden.
Koordinaten- und Parametergleichungen
Kompliziertere geometrische Gebilde wie Geraden, Ebenen, Kreise, Kugeln werden als Punktmengen aufgefasst und durch Gleichungen beschrieben. Dabei kann es sich um Koordinatengleichungen oder um Parametergleichungen handeln.
- Implizite Koordinatengleichung
- Die Koordinatengleichung hat die Form , wobei ein von den Koordinaten abhängiger Rechenausdruck ist.
- Beispiel (Gerade der Zeichenebene)
- Beispiel (Gerade der Zeichenebene)
- Explizite Koordinatengleichung
- Eine der Koordinaten wird durch die anderen ausgedrückt.
- Beispiel (Ebene im Raum)
- Explizite Koordinatengleichungen haben den Nachteil, dass oft Fallunterscheidungen durchzuführen sind; so ist es beispielsweise
- in der Ebene unmöglich, eine Parallele zur -Achse in der Form darzustellen.
- Beispiel (Ebene im Raum)
- Parametergleichung
- Der Ortsvektor eines beliebigen Punktes des Gebildes ist durch einen vektoriellen Rechenausdruck gegeben, der einen oder mehrere Parameter enthält.
- Beispiel (Gerade im Raum):
Analytische Geometrie der Ebene
Punkte in der Ebene
Jeder Punkt der Ebene wird durch zwei Koordinaten beschrieben, z. B. . Die Koordinaten nennt man üblicherweise (in dieser Reihenfolge) die -Koordinate (auch: Abszisse) und die -Koordinate (auch: Ordinate). Gebräuchlich sind auch die Bezeichnungen und .
Die zusammengefassten Koordinaten von Punkten der Ebene bilden geordnete Paare.

Geraden in der Ebene
- Koordinatengleichung
- Man spricht auch von der allgemeinen Form der Geradengleichung.
- Parametergleichung

- Dabei ist der Ortsvektor eines beliebigen, aber fest gewählten Punktes der Geraden (Stützpunkt); ist ein so genannter Richtungsvektor, also ein Vektor, dessen Richtung parallel zur Geraden ist.
Kurven zweiter Ordnung in der Ebene
Durch eine (implizite Koordinaten-)Gleichung zweiten Grades
ist im Allgemeinen ein Kegelschnitt gegeben. Je nach den Werten der Koeffizienten kann es sich dabei um eine Ellipse (Spezialfall: Kreis), eine Parabel oder eine Hyperbel handeln.
Analytische Geometrie des euklidischen Raumes
Punkte im Raum
Jeder Punkt des Raumes ist durch drei Koordinaten bestimmt, z. B. . Jedem Punkt ordnet man seinen Ortsvektor zu, das ist der Verbindungsvektor des Ursprungs des Koordinatensystems mit dem gegebenen Punkt. Seine Koordinaten entsprechen denen des Punktes , werden aber als Spaltenvektor geschrieben:
Die Koordinaten werden (in dieser Reihenfolge) als -, - und -Koordinate oder als -, - und -Koordinate bezeichnet.
Die zusammengefassten Koordinaten von Punkten bilden im räumlichen Fall 3-Tupel.
Geraden im Raum
- Koordinatengleichungen
- Geraden im Raum können nicht durch eine einzige Koordinatengleichung beschrieben werden. Man kann eine Gerade aber stets als Durchschnitt (Schnittmenge) zweier Ebenen auffassen und Koordinatengleichungen dieser beiden Ebenen (siehe unten) verwenden, um die Gerade eindeutig festzulegen.
- Parametergleichung
Die Gleichung hat also dieselbe Form wie im zweidimensionalen Fall.
Ebenen im Raum
- Koordinatengleichung
- Diesen Typ der Ebenengleichung bezeichnet man als Normal(en)form, da der Vektor senkrecht (normal) zur Ebene steht.
- Parametergleichung

- ist der Ortsvektor eines beliebigen, aber fest gewählten Punktes der Ebene (Stützpunkt); und sind linear unabhängige Richtungsvektoren (oder Spannvektoren), also Vektoren parallel zur Ebene, die die Ebene „aufspannen“.
Flächen zweiter Ordnung im Raum
Die allgemeine Koordinatengleichung zweiten Grades
beschreibt eine Fläche zweiter Ordnung. Die wichtigsten Spezialfälle sind:
Ellipsoid, elliptisches Paraboloid, hyperbolisches Paraboloid, einschaliges Hyperboloid, zweischaliges Hyperboloid, Kegel, elliptischer Zylinder, parabolischer Zylinder, hyperbolischer Zylinder.
Verallgemeinerung: Analytische Geometrie eines beliebigen affinen Raumes
Die Konzepte der analytischen Geometrie lassen sich dadurch verallgemeinern, dass man Koordinaten aus einem beliebigen Körper sowie beliebige Dimensionen zulässt.
Ist ein Vektorraum über einem Körper und ein zu gehöriger affiner Raum, so lässt sich ein -dimensionaler Unterraum von beschreiben durch die Parametergleichung
- .
Dabei ist der Ortsvektor eines beliebigen, aber festgewählten Punktes des Unterraumes (Stützpunkt); die Vektoren sind linear unabhängige Vektoren, also eine Basis des Untervektorraums von , der zum betrachteten Unterraum von gehört.
Für handelt es sich um die Gleichung einer Geraden, für um die Gleichung einer Ebene. Ist um 1 kleiner als die Dimension von bzw. , so spricht man von einer Hyperebene.
In Analogie zu den Kurven zweiter Ordnung (Kegelschnitten) der ebenen Geometrie und zu den Flächen zweiter Ordnung der räumlichen Geometrie betrachtet man im -dimensionalen affinen Raum auch so genannte Quadriken, das sind Hyperflächen zweiter Ordnung (mit der Dimension ), die durch Koordinatengleichungen zweiten Grades definiert sind:
Typische Aufgabenstellungen der analytischen Geometrie
Inzidenz-Überprüfung
Hier geht es darum festzustellen, ob ein gegebener Punkt zu einer gegebenen Punktmenge (etwa zu einer Geraden) gehört.
Im zweidimensionalen Raum
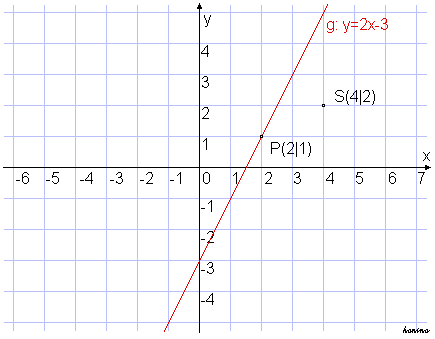
Als Beispiel soll die Gerade mit der expliziten Koordinatengleichung
betrachtet werden.
Der Punkt liegt auf dieser Geraden, wie man durch Einsetzen der Koordinaten und (Punktprobe) erkennt:
Der Punkt hingegen liegt nicht auf der Geraden. Für und gilt nämlich
- .
 (c) Honina, CC BY-SA 3.0
(c) Honina, CC BY-SA 3.0
Im dreidimensionalen Raum
Es soll geprüft werden, ob der Punkt auf der Geraden mit folgender Parameterform liegt:
- .
Wird für der Ortsvektor von eingesetzt, so führt das zu folgenden drei Gleichungen:
Da in allen drei Fällen denselben Wert hat (hier ), liegt auf der Geraden.
Bestimmung der Schnittmenge zweier Punktmengen
Die Bestimmung der Schnittmenge zweier Punktmengen (z. B. des Schnittpunkts zweier Geraden) läuft auf das Lösen eines Gleichungssystems hinaus. Je nachdem, in welcher Form die beiden Punktmengen beschrieben werden, variiert das Verfahren ein wenig:
- Fall 1
- Beide Punktmengen sind durch Koordinatengleichungen gegeben.
- In diesem Fall wird die Schnittmenge durch die Gesamtheit der Koordinatengleichungen beschrieben.
- Fall 2
- Beide Punktmengen sind durch Parametergleichungen gegeben.
- Die Schnittmenge erhält man durch Gleichsetzen der rechten Seiten dieser Gleichungen.
- Fall 3
- Eine der Punktmengen ist durch eine Koordinatengleichung gegeben, die andere durch eine Parametergleichung.
- In diesem Fall setzt man die einzelnen Koordinaten der vektoriellen Parametergleichung in die Vektorgleichung ein.
Im zweidimensionalen Raum
Es soll geprüft werden, ob und wo sich die Graphen der Funktionen und schneiden. Dabei entspricht und :

Um die Schnittpunkte zu berechnen, werden nun die Funktionsterme der Gleichungen der beiden Funktionen gleichgesetzt. Auf diese Weise findet man die -Koordinate(n), für welche die beiden Funktionen die gleiche -Koordinate haben:
Das Lösen dieser quadratischen Funktion führt zu den Lösungen: und .
Durch Einsetzung in eine der beiden anfänglichen Gleichungen ergibt das die Schnittpunkte bei: und .
Im dreidimensionalen Raum
Es soll geprüft werden, ob und in welchem Punkt sich die beiden Geraden und schneiden. Die beiden Geraden seien definiert wie folgt:
Wie im zweidimensionalen Raum werden auch hier die beiden Gleichungen gleichgesetzt:
Die Vektorgleichung kann man in folgende 3 Gleichungen zerlegen:
Addieren der ersten und letzten Gleichung liefert bzw. . Aus der ersten Gleichung ergibt sich damit durch Einsetzen , also . Diese Lösung erfüllt auch die zweite Gleichung, denn .
Den Ortsvektor des Schnittpunktes der Geraden erhält man, indem man einen der beiden berechneten Parameter () in die entsprechende Gerade () einsetzt:
Geschichte
Bereits bei den antiken griechischen Mathematikern Apollonios von Perge und Archimedes von Syrakus finden sich Ansätze einer Koordinatengeometrie. Systematisch aufgebaut wurde die analytische Geometrie erstmals und unabhängig voneinander von den französischen Mathematikern René Descartes (1596–1650) und Pierre de Fermat (1607–1665).[1] Besonderen Einfluss erlangte das Werk La Géometrie (1637) von Descartes.[2] In der Formulierung von Descartes und Fermat sind Koordinaten stets positiv oder null. Isaac Newton ließ erstmals auch negative Koordinaten zu und erweiterte somit die Koordinatenebene zu der heute bekannten Form mit vier Quadranten.[1] Weitere wesentliche Erweiterungen sind Leonhard Euler (1707–1783) zu verdanken, der sich insbesondere mit den Kurven bzw. Flächen zweiter Ordnung befasste. Die Entwicklung der Vektorrechnung (unter anderem durch Hermann Graßmann) ermöglichte die heute übliche Vektorschreibweise.
David Hilbert hat nachgewiesen, dass die dreidimensionale analytische Geometrie vollständig äquivalent ist zu der (synthetischen) euklidischen Geometrie in der von ihm präzisierten Form. In praktischer Hinsicht ist sie dieser weit überlegen. In der ersten Hälfte des 20. Jahrhunderts wurde deshalb die Ansicht vertreten, Geometrie in der Art, wie sie seit Euklid gelehrt wurde, sei nur noch von geschichtlichem Interesse.
Das Autorenkollektiv Nicolas Bourbaki ging sogar noch einen Schritt weiter: Er verzichtete ganz auf geometrische Begriffsbildungen wie Punkt, Gerade usw. und hielt mit Behandlung der Linearen Algebra alles Nötige für gesagt. Dabei wird natürlich – wie stets bei Bourbaki – von den Bedürfnissen der angewandten Mathematik völlig abgesehen.
Aus historischen Gründen wird im Schulunterricht heute noch Analytische Geometrie für ein Teilgebiet der Mathematik gesagt, das im wesentlichen Lineare Algebra ist und nur wenig mit den spezielleren Fragestellungen der analytischen Geometrie zu tun hat (ähnlich wie Infinitesimalrechnung statt Analysis).
Siehe auch
- Dynamische Raumgeometrie
- Formelsammlung analytische Geometrie
- Geradengleichung
- Ebenengleichung
- Kreisgleichung
- Subtangente
Literatur
- Gerd Fischer: Analytische Geometrie: Eine Einführung für Studienanfänger. Vieweg, Braunschweig / Wiesbaden 2001, ISBN 978-3-528-67235-5.
- Wilhelm Blaschke: Analytische Geometrie. 2. Auflage. Springer, 1954, ISBN 978-3-0348-6813-6.
- Arthur Schoenflies, Max Dehn: Einführung in die analytische Geometrie (= Die Grundlehren der mathematischen Wissenschaften in Einzeldarstellungen. Band XXI). 2. Auflage. Springer, Berlin / Heidelberg 1931, ISBN 978-3-662-35991-4.
- Helmut Albrecht: Elementare Koordinatengeometrie (= Mathematik Primarstufe und Sekundarstufe I + II). Springer Spektrum, 2020, ISBN 978-3-662-61619-2.
Weblinks
- Ina Kersten: Analytische Geometrie und Lineare Algebra. Skript, Uni Göttingen
- Joachim Gräter: Analytische Geometrie. Skript, Uni Potsdam
- A. Filler: Analytische Geometrie auf spektrum.de
Einzelnachweise
- ↑ a b H. S. M. Coxeter: Introduction to Geometry. 2. Auflage. Wiley, 1969, S. 108.
- ↑ Andreas Filler: Elementare Lineare Algebra (= Mathematik Primarstufe und Sekundarstufe I + II). Spektrum Akademischer Verlag, Heidelberg 2011, ISBN 978-3-8274-2412-9, S. 49.
Auf dieser Seite verwendete Medien

A small portion of the Cartesian coordinate system, showing the origin, axes, and the four quadrants, with illustrative points and grid.

Graphen der Funktionen 2x^2 - 2 und 2x + 2

ParGlEbene